Linear depth estimation from an uncalibrated, monocular polarisation image
Abstract
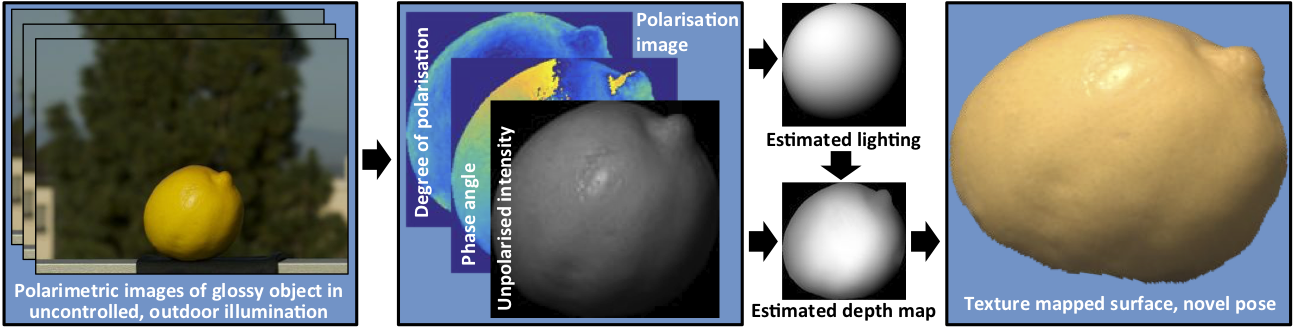
We present a method for estimating surface height directly from a single polarisation image simply by solving a large, sparse system of linear equations. To do so, we show how to express polarisation constraints as equations that are linear in the unknown depth. The ambiguity in the surface normal azimuth angle is resolved globally when the optimal surface height is reconstructed. Our method is applicable to objects with uniform albedo exhibiting diffuse and specular reflectance. We extend it to an uncalibrated scenario by demonstrating that the illumination (point source or first/second order spherical harmonics) can be estimated from the polarisation image, up to a binary convex/concave ambiguity. We believe that our method is the first monocular, passive shape-from-x technique that enables well-posed depth estimation with only a single, uncalibrated illumination condition. We present results on glossy objects, including in uncontrolled, outdoor illumination.