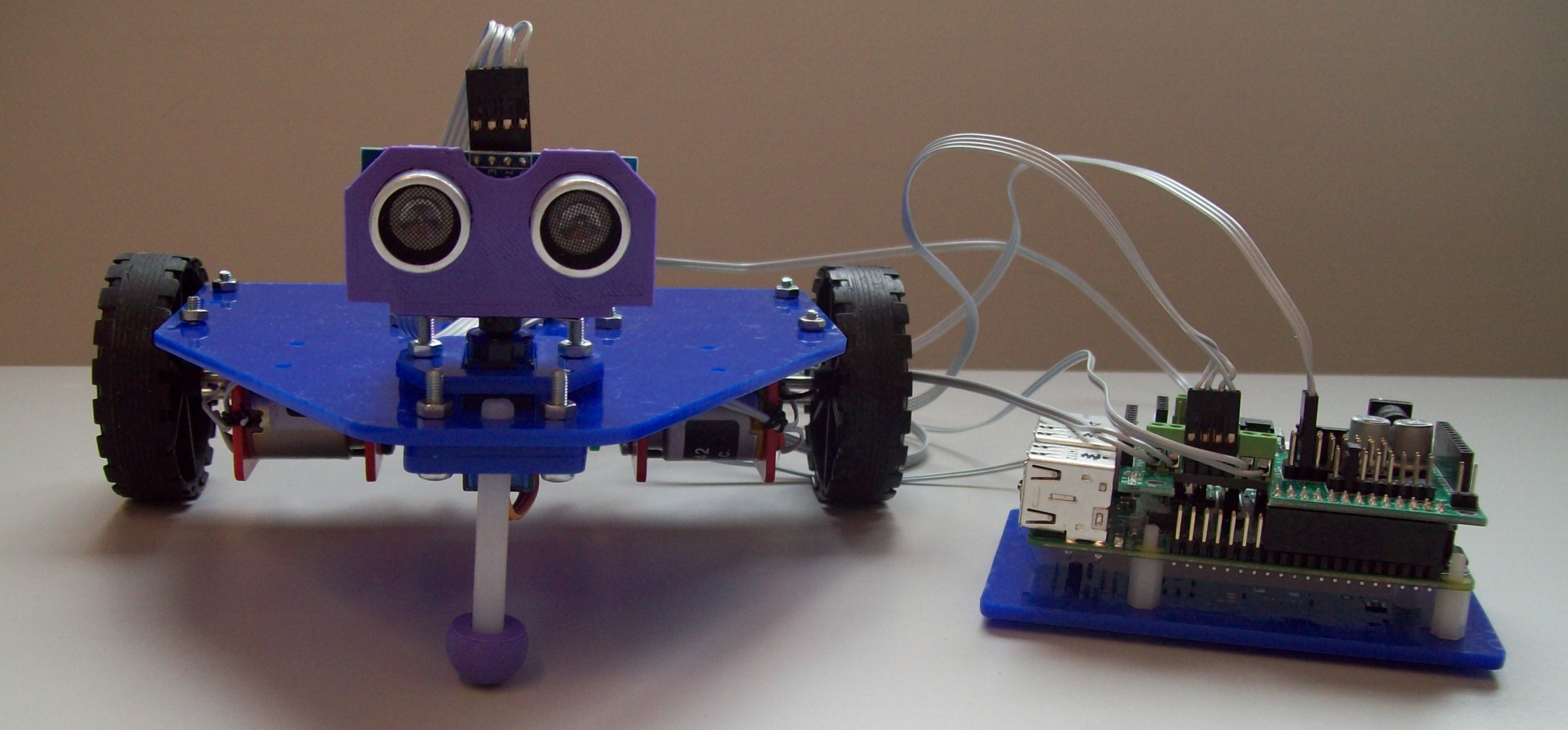
Figure 1 : Scratch the Robot
This was bit of a last minute idea, to develop a cheap, quick to make (mass produce, well 15 units), mobile platform for the head start course ( Link ) ( Local ). This robot will be used in an introduction to robotics / programming laboratory session, approximately 2hours long, but could be easily extended. For me the main aims were:
The robot was constructed from materials i had to hand, if i had a blank canvas would of made a few changes. One of the main limiting factors were the D.C. drive motors, sourced from a previous module (had a box of 50), Como Drills DC Geared Motor, 1.5 - 3V, shown in figure 2. Cost a little on the high side, approx Ł5 each, sourced from RS electronics. These motors are quite simplistic, externalising the main components (motor and gearbox) allowing you to see the motor in action. However, there are cheaper, smaller motors available.

Figure 2 : D.C. drive motor
The base was made from 3mm Perspex (Acrylic) sheet. To minimise material costs a triangular shape was chosen, with the drive motors mounted at the back of the robot. This allowed the smaller components to be cut out of the offcuts (scrap). If smaller motors were available would of preferred to mount the servo motor between the drive motors, on the drive axis. This would of improved traction i.e. maximised weight over the drive wheels and allowed the robot to rotate about the sensor platform i.e. turn the platform without moving the sensor head. The LibreCAD drawing is below (DXF), uses approximately 150mm x 150mm for each robot. Manufactured using a laser cutter for speed.

Figure 3 : Base
Robot base CAD drawing : Link
Raspberry Pi base CAD drawing : Link
The sensor head uses a standard HC-SR04 ultrasonic sensor, very cheap and very easy to use (available form Amazon, Ebay, Onecall etc, cost vary from Ł1 - Ł3). Perhaps a little limited in range and resolution, but for money can't really be beaten. Note, these sensors are very sensitive to reverse voltage damage, this is easily done as the connector is not polorised. When we first ran this lab we blow up some amny sensors :). This sensor is to be mounted on a servo, allowing the robot to scan its environment. As this will require very little torque went for a micro servo, analogue control, 180 degrees scan: ADAFRUIT industries, part number 169, SG92R micro servo. Sourced from OneCall, cost Ł6, cheaper ones are available from Ebay (longer delivery times, but cost reduced to Ł2.50).
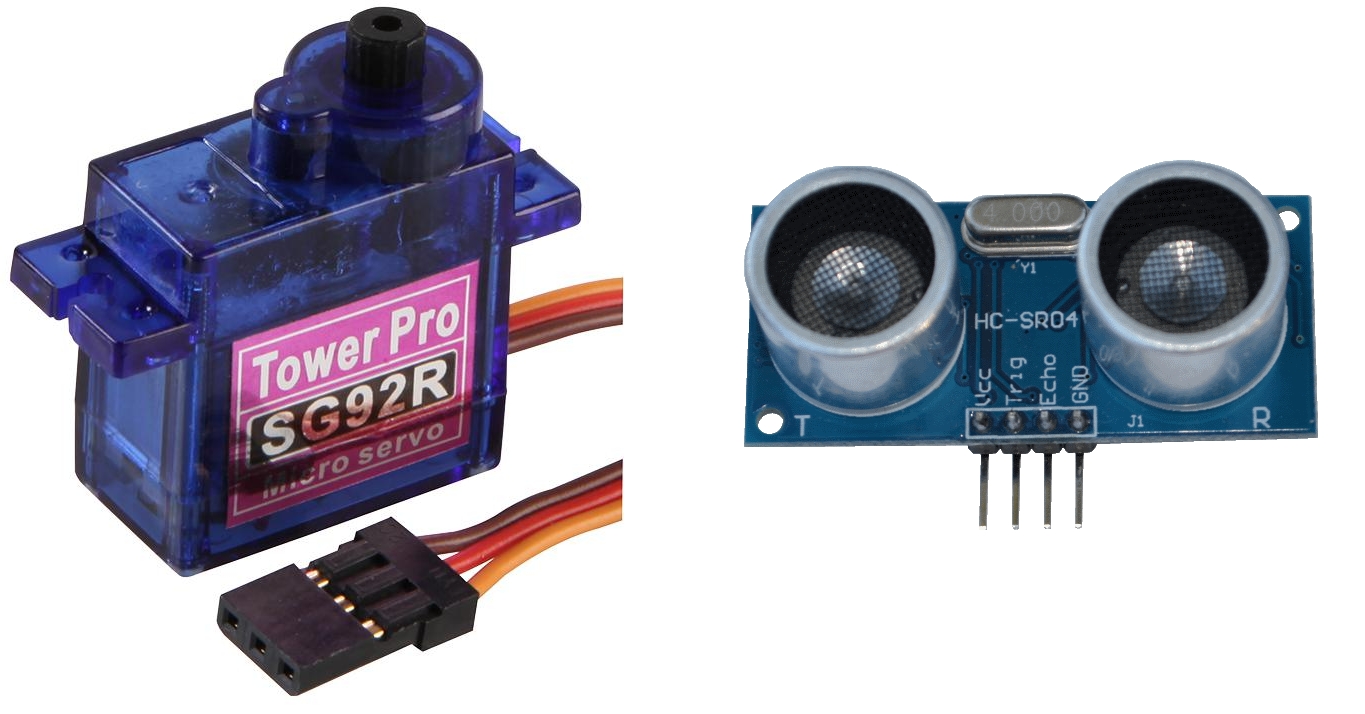
Figure 4 : Servo motor (left), Ultrasonic sensor (right)
The front support is made from 5mm Nylon rod, approximately 45mm long. The bottom skid and sensor mounting bracket shown in figure 5 are 3D printed from ABS. The STL file is given below.
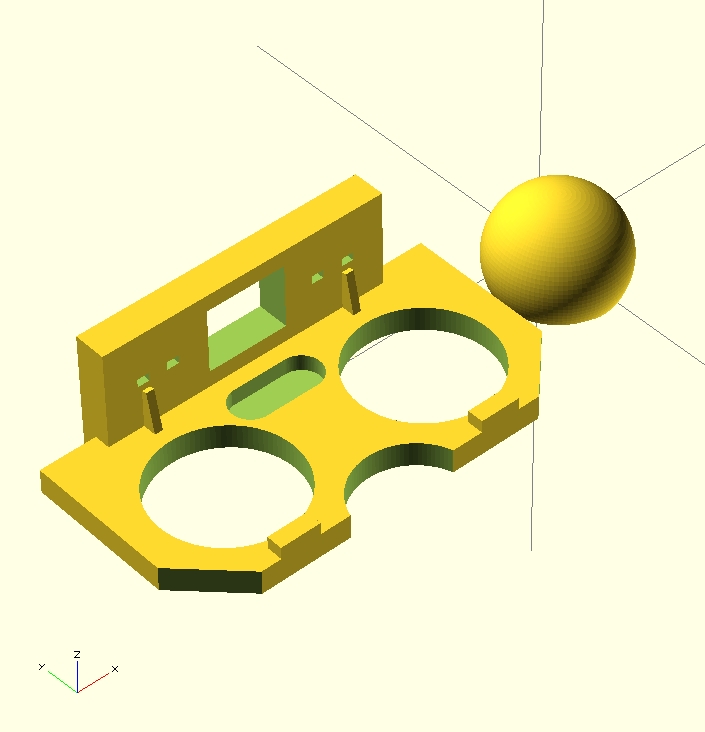
Figure 5 : Sensor head and front skid
3D model : Link
The robot is controlled using a Raspberry Pi programmed using a modified version of the Scratch graphical programming language, ScratchGPIO ( Link ). The interface to the sensors and actuators is through the PiRoCon control board( Link ), perhaps a little on the expensive side, but does the job. This is connected to the platform using ribbon cable and crimped connector (OneCall: MULTICOMP 2226A-03 CRIMP HOUSING, 3 & 4 WAY). Total costs:
Could easily cut this by Ł5 - Ł10 if your not worried about delivery times. The laboratory sheet and Scratch code used on head start is below. Note, the Scratch programs are just prototypes, not the best solutions, sure they can be improved, also the GPIO control bits are slightly different to lab script owing to wiring.
Figure 6 : Laboratory sheet
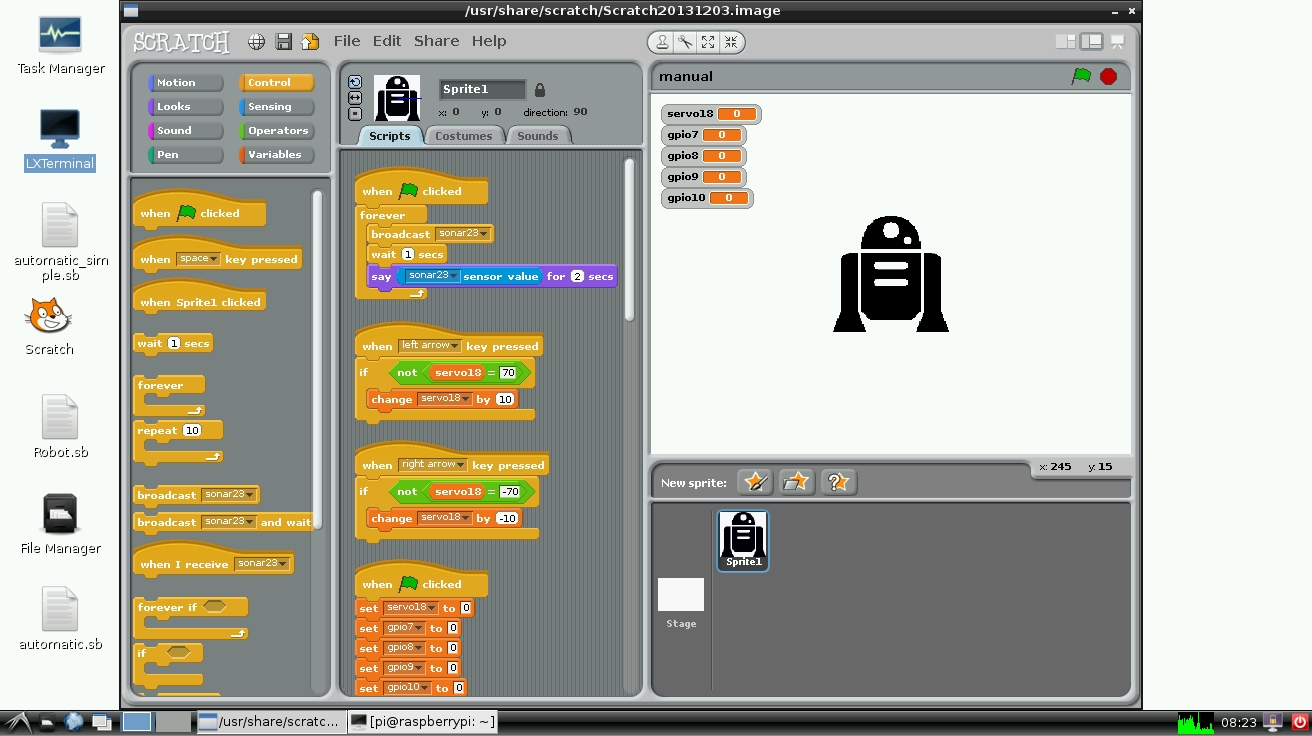
Figure 7 : Scratch screen shot
Laboratory sheet (version 3) : Link
Manual Control : Link
Automatic Control (simple): Link
Automatic Control (complex): Link
To finish on a bit of fun the robots were modified to take part in a robot sumo competition. Being a bit of a cheat modified my robot with a increased gear ratio i.e. higher torque, extra weight (M8 bolts), sticky wheels (sellotape, sticky side outwards) and a boxing glove, as shown in figure 8. A video of the final competition : (Link), (Link), (Link). My robot is the last match, battling the winner of the previous rounds, do confess did cheat, don't think you can class my changes as legal modifications.
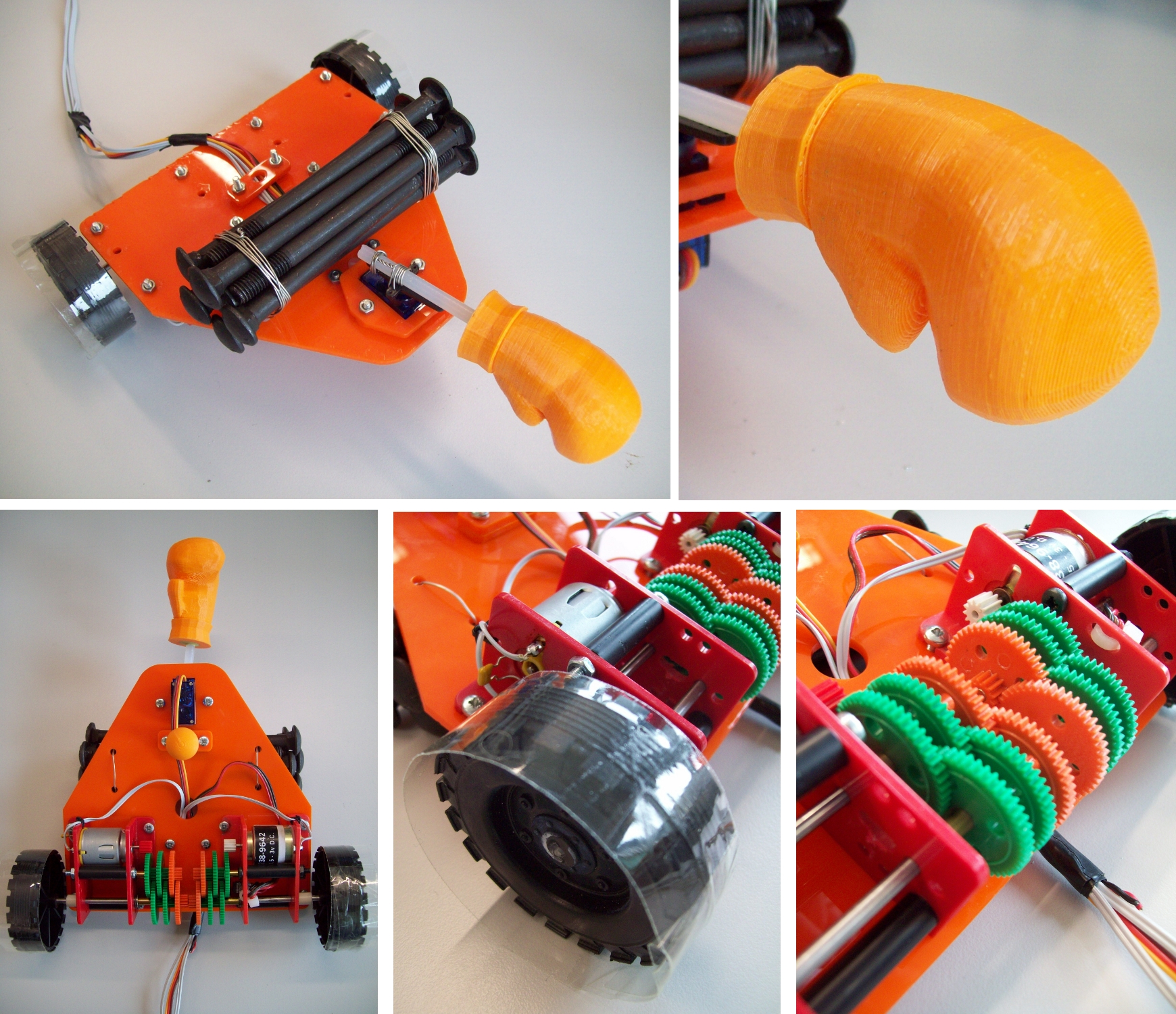
Figure 8 : Robot Sumo

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.
Contact details: email - mike.freeman@york.ac.uk, telephone - 01904 32(5473)
Back